Amidst task-specific learning-based control synthesis frameworks that achieve impressive empirical results, a
unified framework that systematically constructs an optimal
policy for sufficiently solving a general notion of a task is
absent. Hence, we propose a theoretical framework for a task-centered control synthesis leveraging two critical ideas: 1) oracle-guided policy optimization for the non-limiting integration of
sub-optimal task-based priors to guide the policy optimization
and 2) task-vital multimodality to break down solving a task
into executing a sequence of behavioral modes. The proposed
approach results in highly agile parkour and diving on a 16-DoF
dynamic bipedal robot. The obtained policy advances indefinitely
on a track, performing leaps and jumps of varying lengths
and heights for the parkour task. Corresponding to the dive
task, the policy demonstrates front, back, and side flips from
various initial heights. Finally, we introduce a novel latent mode
space reachability analysis to study our policies’ versatility and
generalization by computing a feasible mode set function through
which we certify a set of failure-free modes for our policy to
perform at any given state.
Proposed Approach
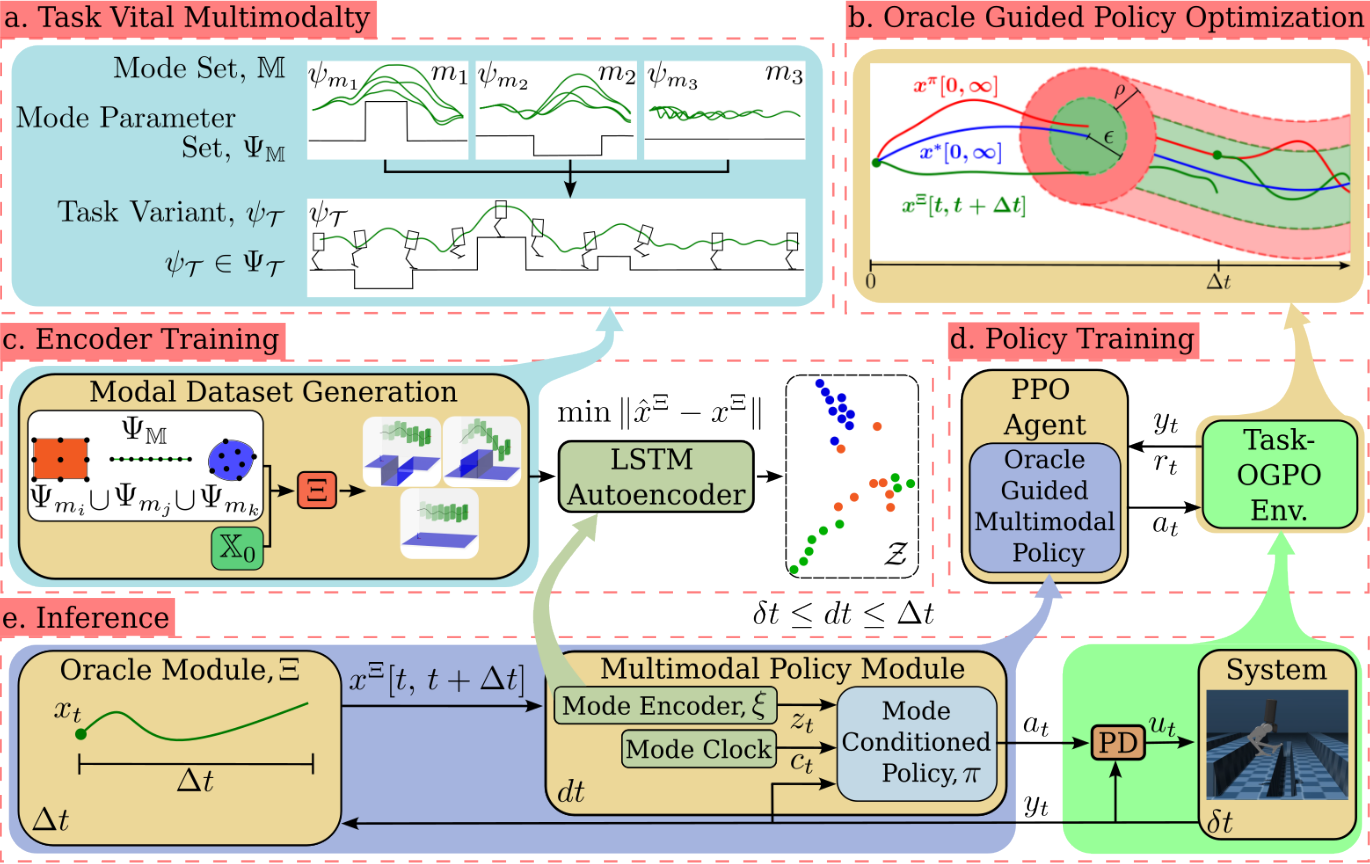
Overview of OGMP: a) The breakdown of a task into its principal modes with a mode and mode parameter set b) Guided exploration
by constraining the search space around the local neighborhood of the oracle’s reference c) Mode encoder: an LSTM autoencoder trained
on a custom modal dataset by minimizing reconstruction loss d) Multimodal policy trained with oracle guided policy optimization on a task
environment e) The closed-loop inference pipeline with the high-level oracle and the low-level multimodal policy
Dive Task
Oracle guided Control
Comparison with reference trajectory
The trajectories visualised correspond to the previous time horizon
Preview Horizon variation
Horizon length: 0.21sec
Very low horizon length leads to failure in solving the task
Horizon length: 0.45sec
Mypoic characteristics leading to block-ground-block transitions
Horizon length: 0.9sec
High horizon length leads to optimal block-block transisitons